Supervised learning can be used for classification tasks.
E.g. given a large amount of images of biopsies, where each image is marked as benign or malignant, we have trained a classification model. Now, given a new biopsy sample we can diagnose cancer as benign or malignant.
And supervised learning can be used for regression tasks.
E.g. using DNA samples from a diverse group of individuals across a wide range of ages, we measured methylation levels at thousands of CpG sites across the genome and trained a regression model by selecting hundreds of sites based on their potential relevance to aging. Now, given a new DNA samples and methylation measurements at these specific CpG sites, we can use the model to forecast individual’s age.
1.2 What is supervised learning?
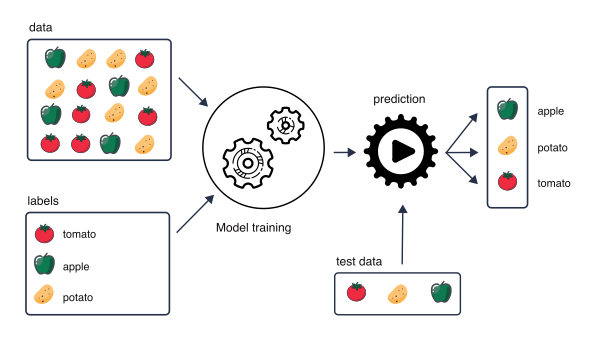
In supervised learning we are using sample labels to train (build) a model. We then use the trained model for interpretation and prediction.
This is in contrast to unsupervised learning, like clustering or Principal Component Analysis (PCA), that aims to discover patterns or groupings in the data without any predefined labels, such as identifying subtypes of a disease based on genetic variations.
Figure 1.1: Ilustration of supervised learning that focuses on training models to make predictions or decisions based on labeled training data.
Training a model means selecting the best values for the model attributes (algorithm parameters) that allow linking the input data with the desired output task (classification or regression).
Common supervised machine learning algorithms include K-Nearest Neighbor (KNN), Support Vector Machines (SVM), Random Forest (RF) or Artificial Neural Networks (ANN). Many can be implemented to work both for classifying samples and forecasting numeric outcome, i.e. classification and regression tasks.
1.3 Outline
Across many algorithms and applications we can distinguish some common steps when using supervised learning. These steps include:
deciding on the task: classification or regression
splitting data to keep part of data for training and part for testing
selecting supervised machine learning algorithms to be trained (or a set of these)
deciding on the training strategy, i.e. which performance metrics to use and how to search for the best model parameters
running feature engineering: depending on the data and algorithms chosen, we may need to normalize or transform variables, reduce dimensionality or re-code categorical variables
performing feature selection: reducing number of features by keeping only the relevant ones, e.g. by filtering zero and near-zero variance features, removing highly correlated features or features with large amount of missing data present
The diagram below shows a basic strategy on how to train KNN for classification, given a data set with \(n\) samples, \(p\) variables and \(y\) categorical outcome
flowchart TD
A([data]) -. split data \n e.g. basic, stratified, grouped -.-> B([non-test set])
A([data]) -.-> C([test set])
B -.-> D(choose algorithm \n e.g. KNN)
D -.-> E(choose evaluation metric \n e.g. overall accuracy)
E -.-> F(feature engineering & selection)
F -.-> G(prepare parameter space, e.g. odd k-values from 3 to 30)
G -. split non-test -.-> H([train set & validation set])
H -.-> J(fit model on train set)
J -.-> K(collect evaluation metric on validation set)
K -.-> L{all values checked? \n e.g. k more than 30}
L -. No .-> J
L -. Yes .-> M(select best parameter values)
M -.-> N(fit model on all non-test data)
N -.-> O(assess model on test data)
C -.-> O
Before we see how this training may look like in R, let’s talk more about
KNN, K-nearest neighbor algorithm
data splitting and
performance metrics useful for evaluating models
And we will leave feature engineering and feature selection for the next session.
1.4 Classification
Classification methods are algorithms used to categorize (classify) objects based on their measurements.
They belong under supervised learning as we usually start off with labeled data, i.e. observations with measurements for which we know the label (class) of.
If we have a pair \(\{\mathbf{x_i}, g_i\}\) for each observation \(i\), with \(g_i \in \{1, \dots, G\}\) being the class label, where \(G\) is the number of different classes and \(\mathbf{x_i}\) a set of exploratory variables, that can be continuous, categorical or a mix of both, then we want to find a classification rule\(f(.)\) (model) such that \[f(\mathbf{x_i})=g_i\]
1.5 KNN example
Figure 1.2: An example of k-nearest neighbors algorithm with k=3; A) in the top a new sample (blue) is closest to three red triangle samples based on its gene A and gene B measurements and thus is classified as a red (B); in the bottom (C), a new sample (blue) is closest to 2 black dots and 1 red triangle based on its gene A and B measurements and is thus classified by majority vote as a black dot (D).
Algorithm
Decide on the value of \(k\)
Calculate the distance between the query-instance (observations for new sample) and all the training samples
Sort the distances and determine the nearest neighbors based on the \(k\)-th minimum distance
Gather the categories of the nearest neighbors
Use majority voting of the categories of the nearest neighbors as the prediction value for the new sample
Euclidean distance is a classic distance used with KNN; other distance measures are also used incl. weighted Euclidean distance, Mahalanobis distance, Manhattan distance, maximum distance etc.
1.6 Data splitting
Part of the issue of fitting complex models to data is that the model can be continually tweaked to adapt as well as possible.
As a result the trained model may not generalize well on future data due to the added complexity that only works for a given unique data set, leading to overfitting.
To deal with overconfident estimation of future performance we can implement various data splitting strategies.
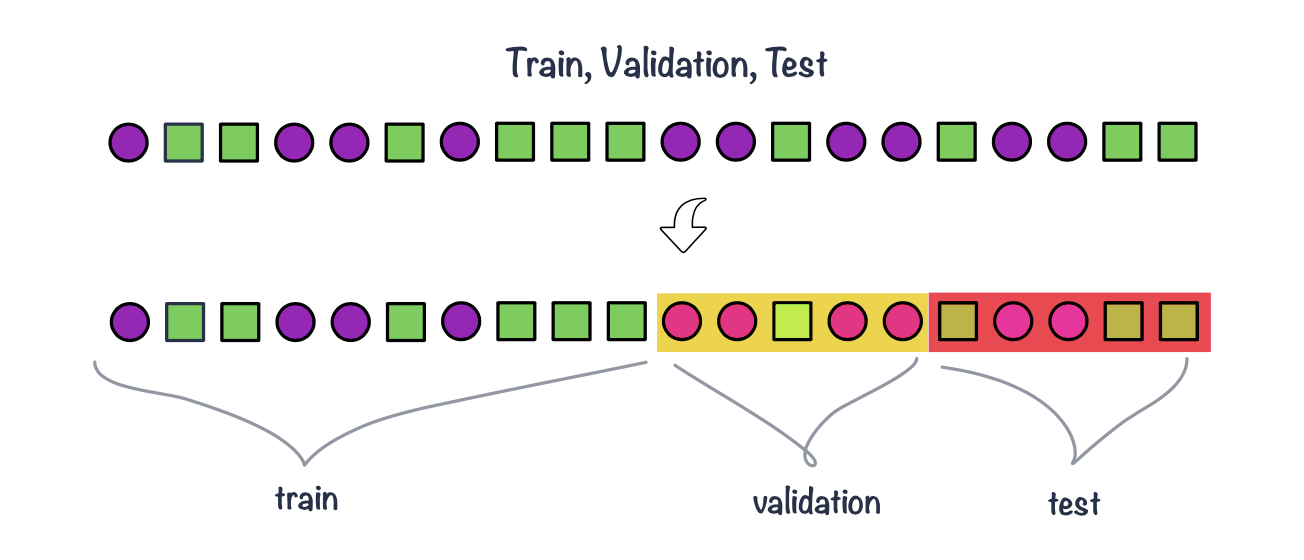
train, validation & test sets
Common split strategies include 50%/25%/25% and 33%/33%/33% splits for training/validation/test respectively
Training data: this is data used to fit (train) the classification or regression model, i.e. derive the classification rule
Validation data: this is data used to select which parameters or types of model perform best, i.e. to validate the performance of model parameters
Test data: this data is used to give an estimate of future prediction performance for the model and parameters chosen
Figure 1.3: Example of splitting data into train (50%), validation (25%) and test (25%) set
cross validation
It can happen that despite random splitting in train/validation/test dataset one of the subsets does not represent data. e.g. gets all the difficult observation to classify.
Or that we do not have enough data in each subset after performing the split.
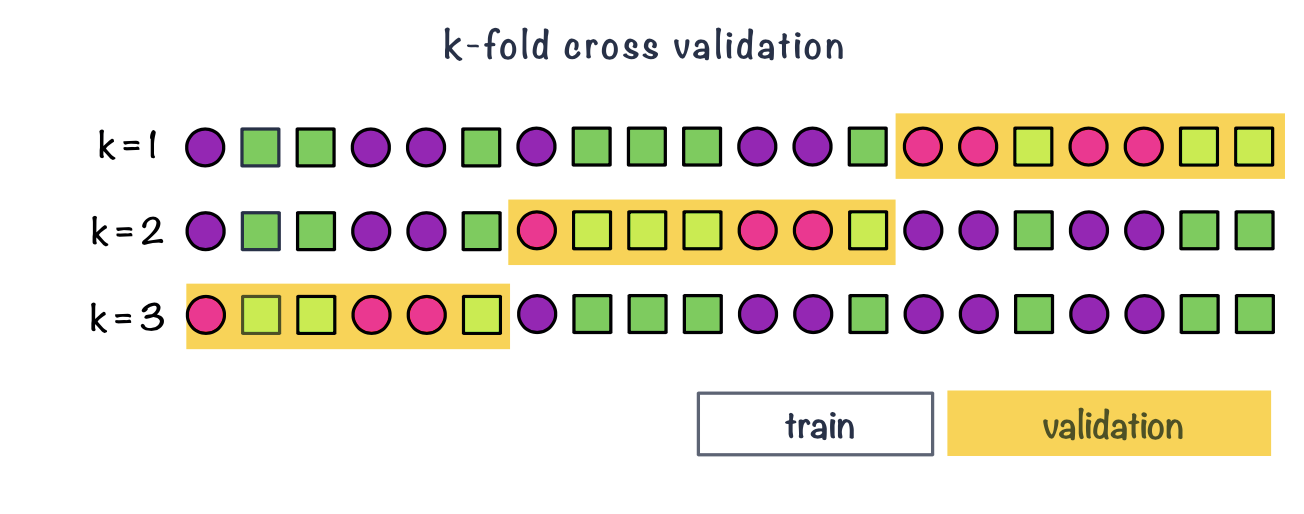
In k-fold cross-validation we split data into \(k\) roughly equal-sized parts.
We start by setting the validation data to be the first set of data and the training data to be all other sets.
We estimate the validation error rate / correct classification rate for the split.
We then repeat the process \(k-1\) times, each time with a different part of the data set to be the validation data and the remainder being the training data.
We finish with \(k\) different error or correct classification rates.
In this way, every data point has its class membership predicted once.
The final reported error rate is usually the average of \(k\) error rates.
Figure 1.4: Example of k-fold cross validation split (k = 3)
repeated cross validation
In repeated cross-validation we are repeating the cross-validation many times, e.g. we can create 5 validation folds 3 times
Leave-one-out cross-validation
Leave-one-out cross-validation is a special case of cross-validation where the number of folds equals the number of instances in the data set.
Figure 1.5: Example of LOOCV, leave-one-out cross validation
1.7 Evaluating classification
To train the model we need some way of evaluating how well it works so we know how to tune the model parameters, e.g. change the value of \(k\) in KNN.
There are a few measures being used that involve looking at the truth (labels) and comparing it to what was predicted by the model.
Common measures include: correct (overall) classification rate, missclassification rate, class specific rates, cross classification tables, sensitivity and specificity and ROC curves.
Correct (miss)classification rate
The simplest way to evaluate in which we count for all the \(n\) predictions how many times we got the classification right. \[Correct\; Classifcation \; Rate = \frac{\sum_{i=1}^{n}1[f(x_i)=g_i]}{n}\] where \(1[]\) is an indicator function equal to 1 if the statement in the bracket is true and 0 otherwise
Confusion matrix allows us to compare between actual and predicted values. It is a N x N matrix, where N is the number of classes. For a binary classifier we have:
Predicted Positive
Predicted Negative
Actual Positive
True Positive (TP)
False Negative (FN)
Actual Negative
False Positive (FP)
True Negative (TN)
Based on the confusion matrix, we can derive common performance metrics of a binary classifier:
Accuracy: measures the proportion of correctly classified samples over the total number of samples. \[ACC = \frac{TP+TN}{TP+TN+FP+FN}\].
Sensitivity: measures the proportion of true positives over all actual positive samples, i.e. how well the classifier is able to detect positive samples. It is also known as true positive rate and recall. \[TPR = \frac{TP}{TP + FN}\]
Specificity: measures the proportion of true negatives over all actual negative samples, i.e. how well the classifier is able to avoid false negatives. It is also known as true negative rate and selectivity. \[TNR = \frac{TN}{TN+FP}\]
Precision: measures the proportion of true positives over all positive predictions made by the classifier, i.e. how well the classifier is able to avoid false positives. It is also known as positive predictive value\[PPV = \frac{TP}{TP + FP}\]
ROC AUC: the receiver operating characteristic (ROC) curve is a graphical representation of the trade off between sensitivity and specificity for different threshold values. The area under the ROC curve (AUC) is a performance metric that ranges from 0 to 1, with a higher value indicating better performance. AUC is a measure of how well the classifier is able to distinguish between positive and negative samples.